
デモの概要について
移動物にセンサーを取り付けて加速度と照度の計測値を基に状態を検知し、結果を画面表示して遠隔監視するお試しIT活用iiモデルです。
遠隔画面により、目視できない場所から対象物の状態を把握する用途が考えられます。
【備考】(特非)モノづくり応援隊in大田区として、第22回 おおた工業フェア(2018年)に出展

移動物にセンサーを取り付けて加速度と照度の計測値を基に状態を検知し、結果を画面表示して遠隔監視するお試しIT活用iiモデルです。
遠隔画面により、目視できない場所から対象物の状態を把握する用途が考えられます。
【備考】(特非)モノづくり応援隊in大田区として、第22回 おおた工業フェア(2018年)に出展
動画の内容(構成)は以下になります。
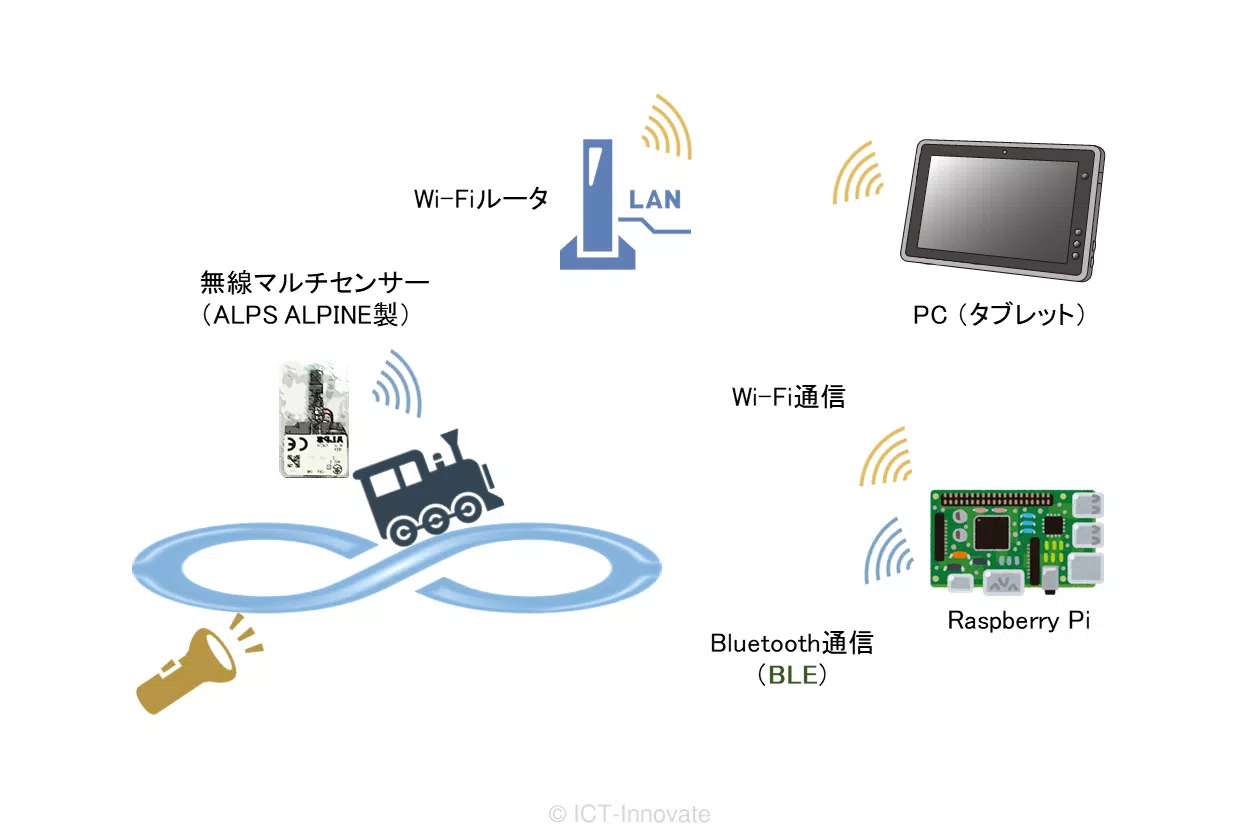
Raspberry Pi(ラズベリーパイ)に対しては、使用するPCと同じネットワーク(LAN等)に接続する準備(Wi-Fi設定またはイーサネット接続)を済ませておけば、使用する際には電源に接続するだけです。特に操作の必要はありません。
無線マルチセンサーは電池式です。使用する際にはスイッチを入れます。
使用するPCに対しては、インストール等の環境変更は必要ありません。ブラウザからRaspberry PiのNode-REDで作成したアプリ画面にアクセスします。(Raspberry Piと同じネットワークに接続している前提)
今回のデモ構成においては、移動する模型の状態検知を無線マルチセンサーで行っています。無線マルチセンサーが送信するデータをRaspberry Piで受信し、そのデータを基に状態を判定します。Raspberry Piで動作するアプリ画面では、センサー計測値と判定結果をグラフィカルに画面表示します。
デモ動画におけるアプリ画面の「IoTセンサー可視化画面」は、移動する模型の状態をリアルタイムに反映して表示します。遠隔監視に役立つことを示すモデルです。
アプリ画面における「停止中」「移動中」は、無線マルチセンサーから送信される加速度の計測値を基に判定しています。また「トンネル」「ライト受光」は、照度の計測値を基に判定しています。
一方、「事故発生」時の表示は、加速度の計測値から重力加速度の方向を判定して、模型が置かれている姿勢を把握して画面表示に反映しています。
また、デモ動画では説明がありませんが、アプリ画面では模型の周回管理を行っています(画面の下側)。「ライト受光」イベントをトリガーとしてラップタイムや周回数を管理しています。
今回のデモ構成において、Raspberry Piと無線マルチセンサーはBluetooth(BLE / Bluetooth Low Energy)で通信を行っています。
デモ動画においては、アプリ画面の「IoTセンサー可視化画面」しか説明されていませんが、「IoTデモ操作画面」も用意されています。画面左上のメニューボタンで「IoTセンサー可視化画面」と「IoTデモ操作画面」を切り替えることができます。
「IoTデモ操作画面」では、センサーデータ受信処理の操作(開始/停止)や、Raspberry Piに対する操作(シャットダウン)を行うことが可能です。
また「IoTデモ操作画面」において、センサーデータをCSVファイルとして出力することを選択できます。出力されるCSVファイルは、Raspberry Pi上のファイルになりますが、PC側から共有フォルダのファイルのように扱うことができます。