デモの概要について
ラベル貼りが正しく行われていることを色解析で例外検知し、結果を画面表示と音で伝えるチェック作業支援のお試しIT活用iiモデルです。
色がチェック対象でチェックスピードをそれ程要求されない職場に用いて、作業を効率化する用途が考えられます。
【備考】(特非)モノづくり応援隊in大田区として、第24回 おおた工業フェア(2020年)に出展

ラベル貼りが正しく行われていることを色解析で例外検知し、結果を画面表示と音で伝えるチェック作業支援のお試しIT活用iiモデルです。
色がチェック対象でチェックスピードをそれ程要求されない職場に用いて、作業を効率化する用途が考えられます。
【備考】(特非)モノづくり応援隊in大田区として、第24回 おおた工業フェア(2020年)に出展
動画の内容(構成)は以下になります。
Raspberry Pi(ラズベリーパイ)に対しては、使用するPCと同じネットワーク(LAN等)に接続する準備(Wi-Fi設定またはイーサネット接続)を済ませておけば、使用する際には電源に接続するだけです。特に操作の必要はありません。
Raspberry Piの起動と共に、接続されたカメラやセンサー等のデバイスも利用可能な状態になります。
使用するPCに対しては、インストール等の環境変更は必要ありません。ブラウザからRaspberry PiのNode-REDで作成したアプリ画面にアクセスします。(Raspberry Piと同じネットワークに接続している前提)
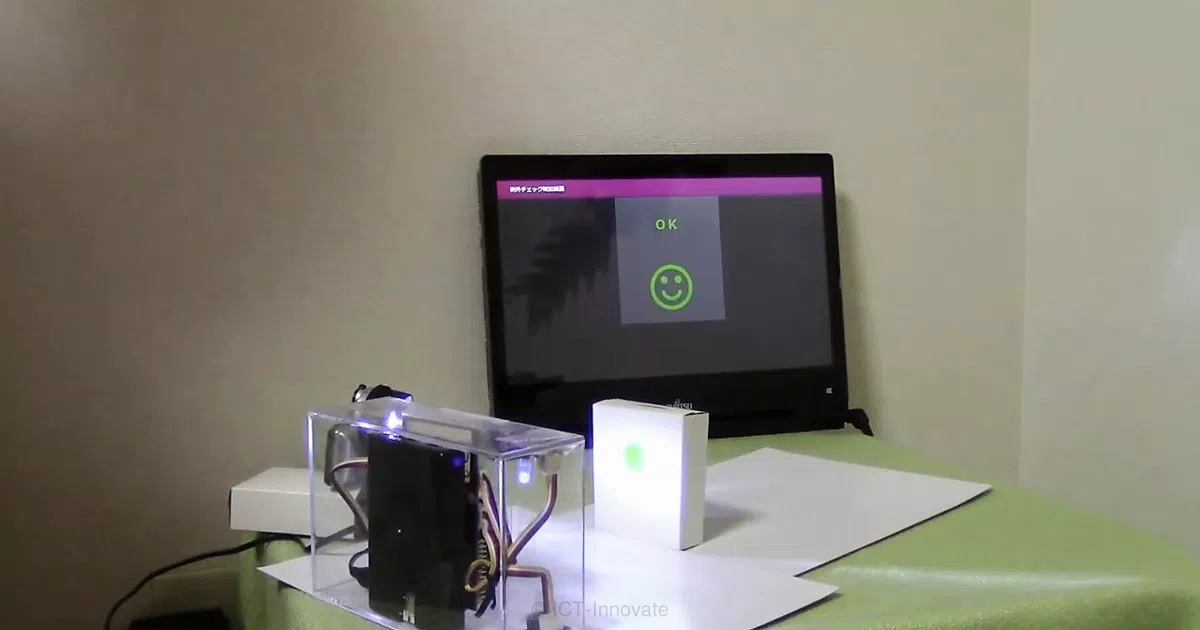
今回のデモ構成においては、チェック対象物の検知をRaspberry Piに接続された音波距離センサーで行っています。センサーの検知エリア内に物が置かれると自動でチェック処理が行われます。センサーが物を検知するとLEDが点灯するので状態が分かります。
デモ動画におけるチェック処理の判定は、箱に貼られたラベルが緑色なら「OK」で、それ以外なら「NG」です。判定結果を画面表示と音で確認することができます。
デモ動画におけるアプリ画面の「例外チェック確認画面」では、判定結果を「OK」の表示とチャイム音、または「NG」の表示とブザー音で通知します。
なお、デモ動画では分かり辛いかもしれませんが、判定「NG」の際はブザー音だけでなく音声アナウンスで状況を通知します。緑色ではないと判定した場合は「ラベルが正しくありません」と通知し、箱の色と同じと判定した場合は「ラベルの貼り忘れです」と通知します。
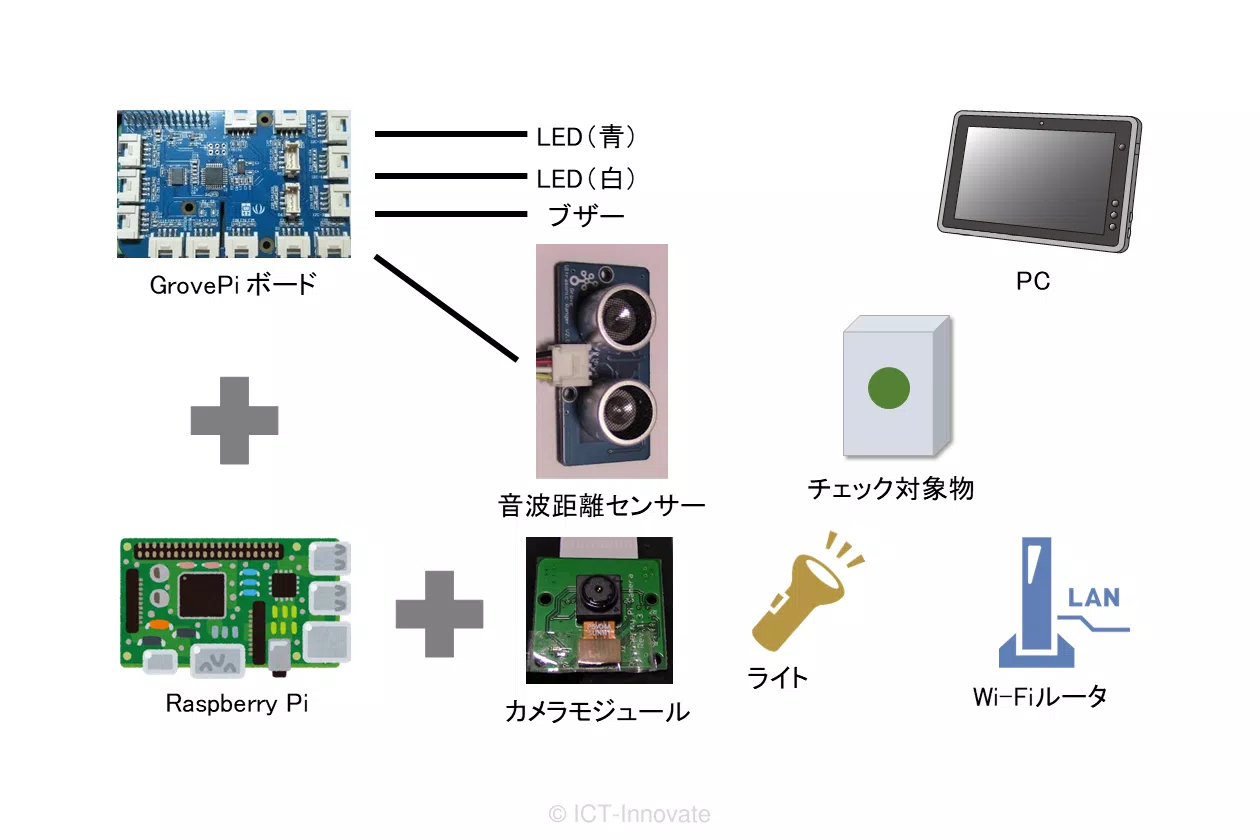
Raspberry Piに対しては、専用のカメラモジュールを接続しています。このカメラは写真撮影も動画撮影も可能です。
また、音波距離センサーやLEDやブザーを使用するにあたり、Grove規格品を使用すれば、Raspberry Piにコネクタ接続して使用できます(電子回路を組む必要がありません)。
今回のデモ構成におけるチェック処理は、複数の技術によって構成されています。
また、色識別の為に写真撮影を行うにあたり、チェック対象物をライトで照らしています。これには一定の照度で写真撮影を行うことで、安定した色識別の結果を得る目的があります。
デモ動画におけるアプリ画面の「例外チェック確認画面」では、画面表示に加えて音でも通知を行います。この際の効果音やアナウンスは、アプリ画面を見ているPCから出力されます。Raspberry Pi側のアプリ画面の処理が、PCブラウザの機能を利用して実現しています。
なお、Raspberry Piにブザーが接続されていますが、これはチェック処理とは関係がありません。物が音波距離センサーに接近し過ぎると警告する為に用いられます。
Raspberry Piに接続している専用のカメラモジュールは、仕様上は写真撮影に2秒間必要とされています。ただ実際に使ってみるとそれ程かからないようです。
デモ動画において2秒間という時間を提示しているのは、写真撮影の為というよりは音波距離センサーによる物体検知を安定して行う目的があります。
チェック対象物がカメラの前に正しく位置してこそ写真撮影をする意味があります。センサーの検知エリアに物が瞬間的に入っただけではチェック処理を開始しないようにするのと、正しい位置にチェック対象物が設置されるまでの時間として2秒間を設定しています。
なお、今回のデモ構成においては、チェック対象物をカメラの前に手で置いています。実用的ではないことは分かっていますが、デモの為に流れ作業のような仕組みを用意することができませんでした。
検査対象物あるいはカメラ側の方が移動するような環境において用いれば、チェック処理の自動化が可能になるでしょう。
追加の情報として、当モデルではRaspberry Piでセンサーを使用するにあたり、GrovePiボード(GrovePi+ / GrovePi Plus)を使用しております。
2022年2月時点の確認では、現在標準のRaspberry Pi OS(即ちBullseye版)の環境においては、GrovePiインストール・スクリプトの実行時にエラーが発生します。
よって、Raspberry Piの環境としては、Raspberry Pi OS(Legacy)、即ちBuster版の環境を選択する必要があります。今後対策が取られるかもしれませんが情報としてお知らせします。